operanthouse�̃w�b�_�[
Kitaya lab
Miniscope���
�y�T�v�z
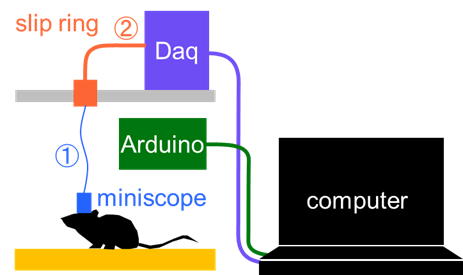
�I�y�����g�n�E�X�ł̓w�b�h�}�E���g�^�u���������ł���UCLA��w��Miniscope v4��p����in vivo calcium imaging���g�������ł��܂��Bin vivo imaging�ł̓C���[�W���O�f�[�^�ƍs���̃f�[�^�������邽�߁Aminiscope�Ƌ��ɃI�y�����g�n�E�X�̐����PC�ōs���܂��B���삪�m�F����Ă���OS��Windows 8.1/10�ł��B�m�F�͂��Ă܂���Windows 11�ł������Ǝv���܂��B
�܂��V��ɂ̓P�[�u���̂˂�������X���b�v�����O���lj�����܂��B
�y�K�v�ȕ��z
���O���d���ڒ��� or �G�|�L�V�n�ڒ���HDMI(�I�X) - DisplayPort(�I�X)�P�[�u���@�@(����PC��DisplayPort�����Ȃ��ꍇ)
�y�X���b�v�����O�̐���z
���P�[�u���̏�����
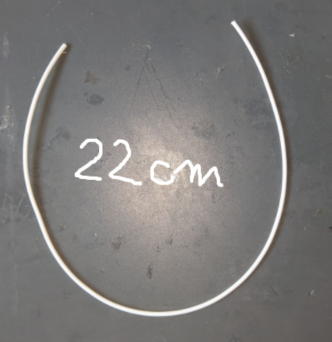
�܂��͏�}�@�̃P�[�u�������܂��B
�P�[�u���ׂ͍��ď_�炩��COONER WIRE����CW2040-3650 SR���g���܂��B

�܂�22cm�̒����ɐ�܂��B
���}��Coaxial�P�[�u���̒f�ʐ}�ł����A�A�ɂ��z�ɂ��\���ɂȂ��Ă��܂��B
Coaxial�P�[�u���͂��̍\���ɂ��V�O�i����d���g�m�C�Y�������Ă��܂��B

�O���̔햌���܂��B

��̂Ƃ������s���Z�b�g�Ȃǂő@�ۂ��قǂ��܂��B

�@�ۂ��قǂ��ƍׂ��r�j���햌���ꂽ���������Ă���Ǝv���܂��B���ꂪ�v���X�ɂł��B
�z�ɈȊO�̑@�ۂ̓}�C�i�X�ɂȂ̂ł������˂����đ��˂܂��B

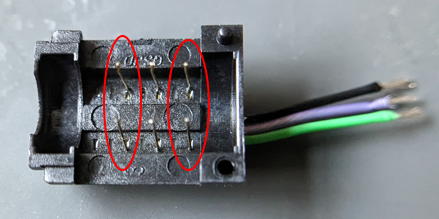
���͏��X����ł����A�v���X�ɂ̐�[�̔햌���܂��B
�j�b�p�[�Ŕ햌�̒[�ɏ�����������t���Ă���j�b�p�[�Ŕ����グ��Ə�肭�s���܂��B
���̍�Ƃ͊g�勾����̌��������ōs���Ɗy�ł��B

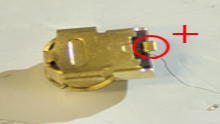
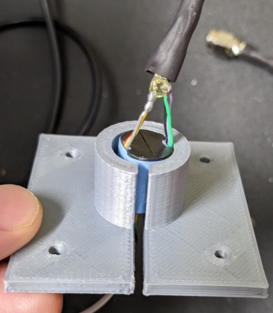
����Miniscope�ڑ����邽�߂�Hirose�R�l�N�^�[�i���j���n���_�t�����܂��傤�B
���ʃe�[�v�����ɂ͂�A���̏��Hirose�R�l�N�^�[��t���܂��B
���̍�Ƃ͗���ł��s�\�ł͂Ȃ��ł����A�g�勾�����̌��������ōs���������������߂��܂��B
�ۂň͂��������̓v���X�ɂł���ȊO�̋��F�̕����͑S�ă}�C�i�X�ɂł��B
�t���L�V�u���A�[����p���ăP�[�u���x�悢�ʒu�ɃZ�b�g���ăn���_�t�����s���܂��B
�n���_�t����ɃV���[�g���ĂȂ����e�X�^�[�Ŋm���߂邱�Ƃ�Y��Ȃ��ł��������B

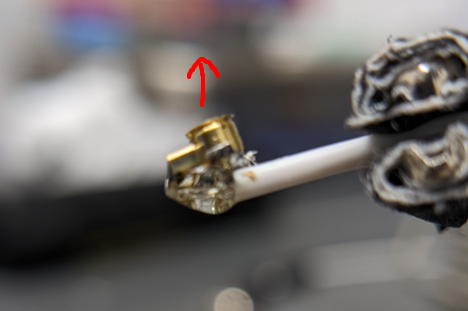
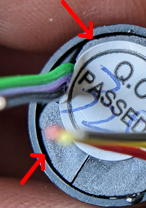
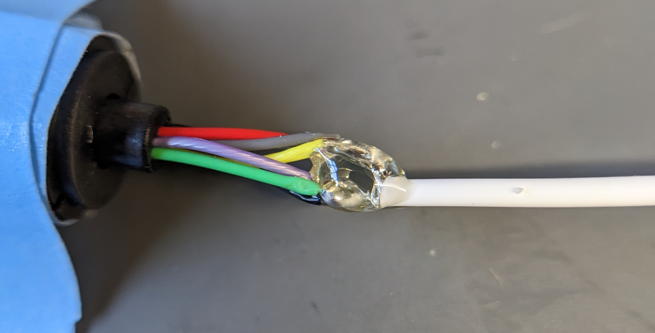
���̂܂܂��Ƌ��x�I�Ɏア�̂Ŏ��O���d���ڒ��܁i�������̓G�|�L�V�ڒ��܁j�Ńv���X�ɂ̐��𒆐S�ɕ⋭���܂��B
���̎��R�l�N�^�[�̐ڑ��������ɂ���Ɛڒ��܂��ڑ����ɗ���čs���ړ_�s�ǂɂȂ�댯�����邽�߁A�ʐ^�̂悤�ɐڑ����͏�������Ă��������B
�i���O���d���ڒ��܂͌ł܂�܂ő҂��Ȃ��ėǂ��̂ł����߁j
���X���b�v�����O�̉����Ɛڑ���
���ɃX���b�v�����O�̉������s���܂��B
�X���b�v�����O�̌����͈ȉ��̒ʂ�ŁA���ɉ�]����`���̂̃h�����i�j�Ƃ���ɐڐG����d�Ɂi�ԁj������A�h��������]���Ă��d�ɂ͐ڐG�������邽�ߓd�C�I�Ȑڑ����L�[�v�ł��܂��B
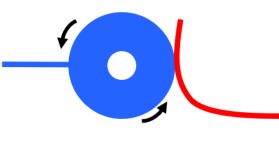
�g�p����X���b�v�����O�A775 (Adafruit industries)�ł����A������ʼn�]������Ƃ�������������R��������Ǝv���܂��B
�����775�̓��C����6����A1���C���ɂ��d�ɂ�2�{���邽�ߍ��v12�{�̓d�ɂ��h�������������Ă��邽�߂ł��B
�������Ȃ���Miniscope��2���C�������g��Ȃ����ߎc���4���C���͕s�v�Ȃ̂ł܂��͂������������܂��B
�܂��]���Ȓ����̔z�����܂��B

���Ƀv���X�e�B�b�N�̃J�o�[���������܂��B
�X���b�v�����O�̏㕔�Ɍ��Ԃ�������Ǝv���܂��B���̌��ԂɃj�b�p�[����������ŃJ�o�[��j�Ă����܂��B
 �@�@
�@�@ �@�@
�@�@



���܂����B
���ɃX���b�v�����O�����܂��B�{�̂��Q�Ɋ���܂��傤�B�h�����͎����グ��ΊO��܂��B
���ꂼ��3�̓d�ɂ������Ă���̂�������Ǝv���܂��B1��1���C���ɑΉ����Ă��܂��B
Miniscope�ł�2���C���̂ݕK�v�Ȃ̂ŐԂň͂������C�����������܂��傤�B
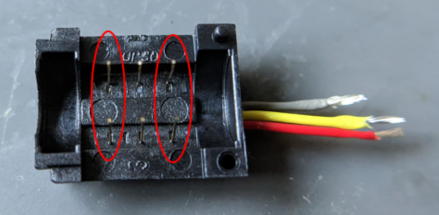
�s�v�ȃ��C�����ʐ^�̂悤�ɊO���ɋȂ��ăh�����ɐڐG���Ȃ������܂��i�^�̃��C���͐G��Ȃ��悤�ɒ��ӁI�j�B
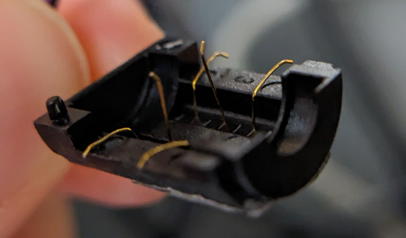
��Ƃ��I�������g�ݗ��Ē����A�e�[�v�Ŋ����ČŒ肵�܂��B
����]�̒�R�������Ă���X���b�v�����O�̉����͊����ł��B
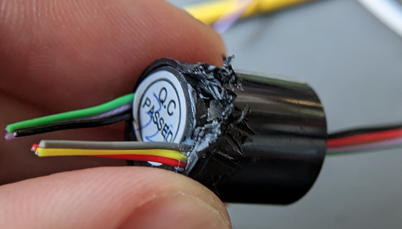
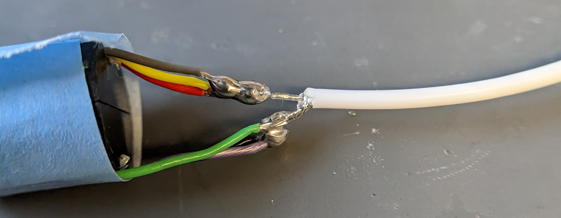
Coaxial�P�[�u���̃X���b�v�����O�����قǂƓ�����Ƃɂ��햌�������A�I�o�����܂��B
�����ăX���b�v�����O�Ƀn���_�t�����܂��B�����ăV���[�g���ĂȂ����m�F���܂��B
�ڒ��܂ŋ��x�I�Ɏア������⋭���܂��B
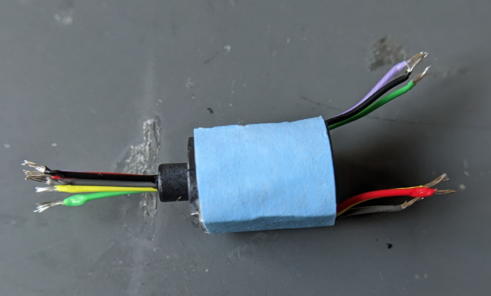
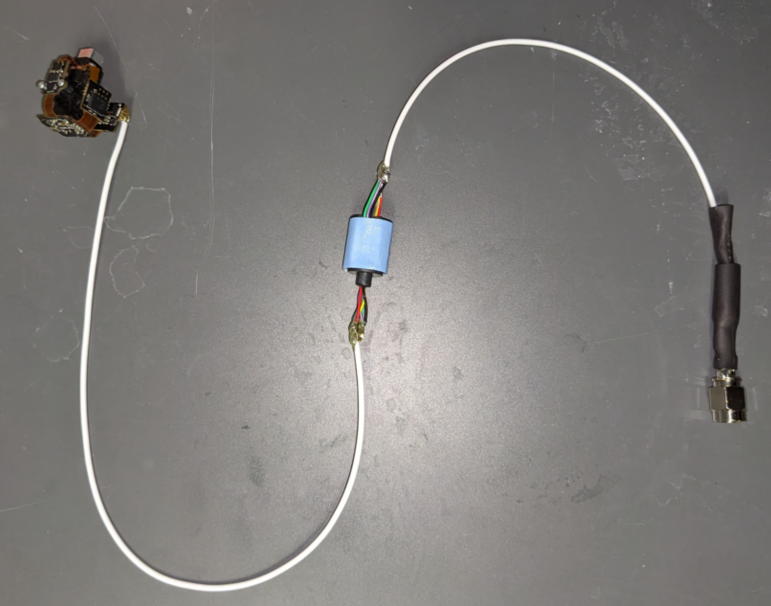
����Ň@�̃��C���͊����ł��B���͇A�̃X���b�v�����O-DAQ�Ԃ̔z���쐬�ł��B
Coaxial�P�[�u����20cm�̒����ɐ�A���[��I�o�����܂��B
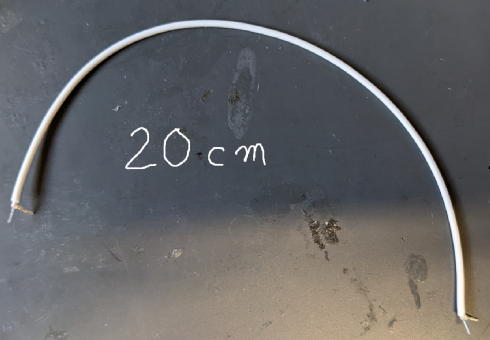
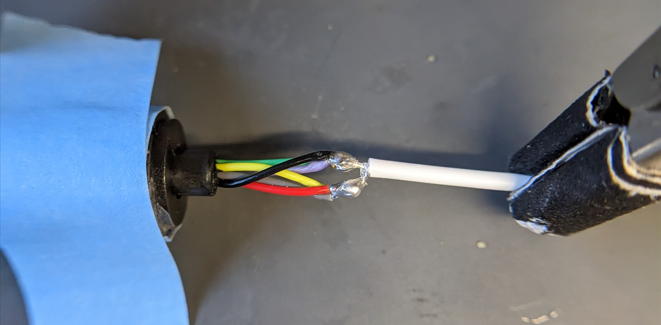
�X���b�v�����O�Ƀn���_�t�����Đڒ��܂ŕ⋭���܂��B
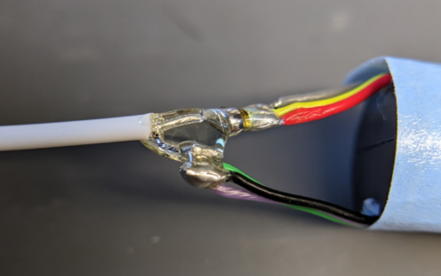
���̏ꏊ�ɃX�g���X���W�����Ȃ��悤��6mm�M���k�`���[�u���t���܂��B


���ɔ��Α���SMA�R�l�N�^�[�Ƀn���_�t�����A�V���[�g���ĂȂ����̊m�F��A�ڒ��܂�t���A�M���k�`���[�u��t���܂��B
�n���_�t����ɔM���k�`���[�u�����鎖�͂ł��Ȃ��̂őO�����Ĕz���ɒʂ��Ă����Ă��������B



Miniscope�ɐڑ������犮���ł��B
�y�z���_�[�̐���z
���ɃX���b�v�����O��DAQ�{�[�h�iData acquisition board�j���I�y�����g�n�E�X�ɌŒ肷�邽�߁A�����j���[�̐���̏����y�[�W(��۰��)����_�E�����[�h�ł���3D�v�����^�f�[�^��Option parts/Miniscope�t�H���_�ɂ���ȉ��̃p�[�c��������܂��B
- Commutator holder.stl
- DAQ holder.stl
�����X���b�v�����O�A�E��DAQ�{�[�h������X���b�g�ł��B
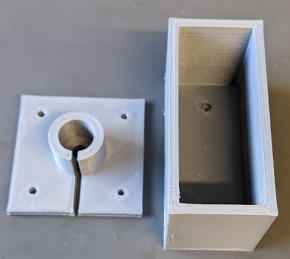
�����X���b�g���I�y�����g�n�E�X�̃t�^�ɌŒ肵�܂��傤�B
[�J�������o�̏ꍇ]
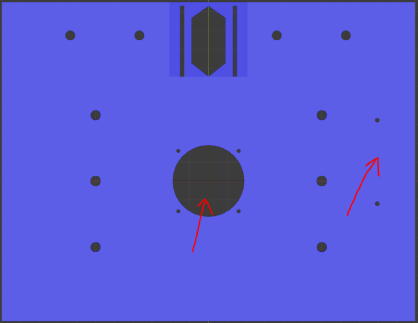
[IR�Z���T�[�o�[���o�̏ꍇ]
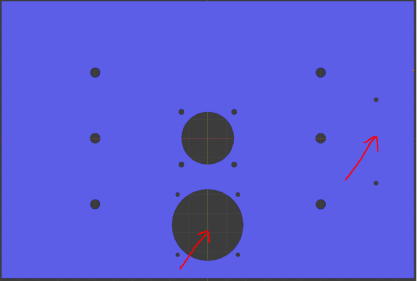
�����ł�IR�Z���T�[�o�[���o�p�̃t�^��p���ĉ�����܂��B
�X���b�v�����O���z���_�[�ɐݒu���܂��B
2mm�̃l�W�ŃX���b�g���Œ肵�܂��B
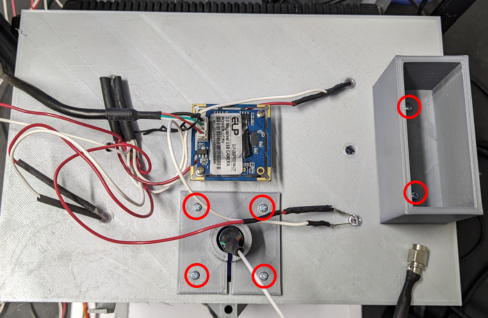
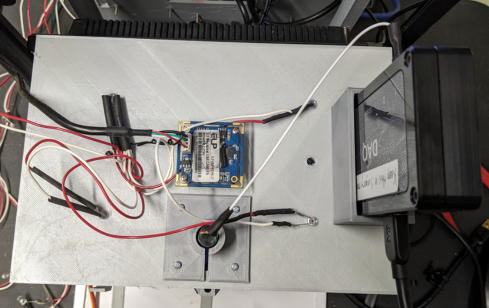
DAQ board��ݒu���܂��B
�yPC�̏����Ɛڑ��z
���\������Ȃ�ɗǂ�Windows PC���������܂��B
Python�p�b�P�[�W�ł���ANACONDA�̃T�C�g(https://www.anaconda.com/download)����Distribution Installer���_�E�����[�h���A�C���X�g�[�����܂��B
�I�y�����g�n�E�X�ł͂������̃v���O�C��������K�v�����邽�߁A����python�������Ȃ��悤�Avirtual environment�̐ݒ�����܂��傤�B
[Virtual environment]
Anaconda Prompt���N�����܂��B
�ȉ��̕������^�C�v����OperaEnv�Ƃ������O�̉��z�������܂��B

���ɍ쐬��������ON�ɂ��܂��B

����ɂ��Apython�v���O���������s����ۂɂ�OperaEnv���g���悤�ɂȂ�܂��B
���Ȃ݂ɂ��̉��z����C�h���C�u > Users > ���[�U�[�� > .conda > envs�ɕۑ�����Ă��܂��B
�ł͎��Ƀv���O�C�������čs���܂��傤�B
�܂���USB�J�������L���v�`���[���邽��OpenCV�����܂��B

����Arduino�Ƃ̃V���A���ڑ��̂��߂�pyserial�����܂��B

�����win32api���C���X�g�[�����܂��B
�����python���̐ݒ�͊����ł��B
[�I�y�����g�n�E�X]
���̓I�y�����g�n�E�X�̃R�[�h��PC�p�ɕς��܂��傤�B
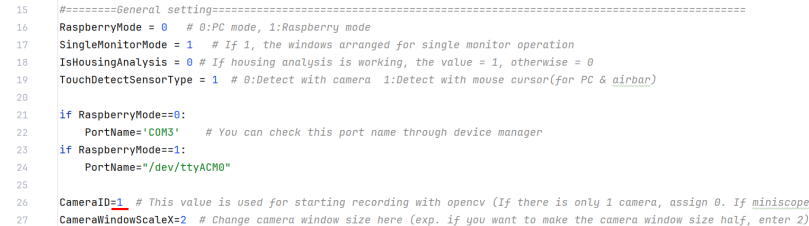
�������ŃI�y�����g�n�E�X�̃v���O�������J���AGeneral setting��RaspberryMode�̒l��0�ɂ��܂��B

����R���s���[�^�����Y�p�C����PC�֕ύX���邽�߁AArduino��USB�P�[�u���̐ڑ�������Y�p�C����PC�֕ς��܂��B�܂�USB�J������PC�ɐڑ����Ă��������B
�ԊO���Z���T�[�o�[���g���Ă���ꍇ�͂����PC�ɐڑ����Ă��������B
����PC���ǂ̃|�[�g��Arduino��F�����������ׂ܂��B
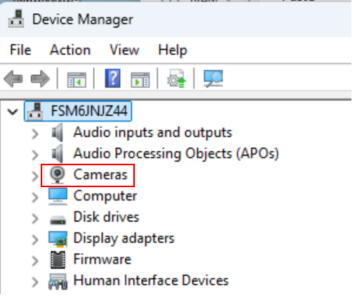
�R���g���[���p�l������f�o�C�X�}�l�[�W���[���J�����������B
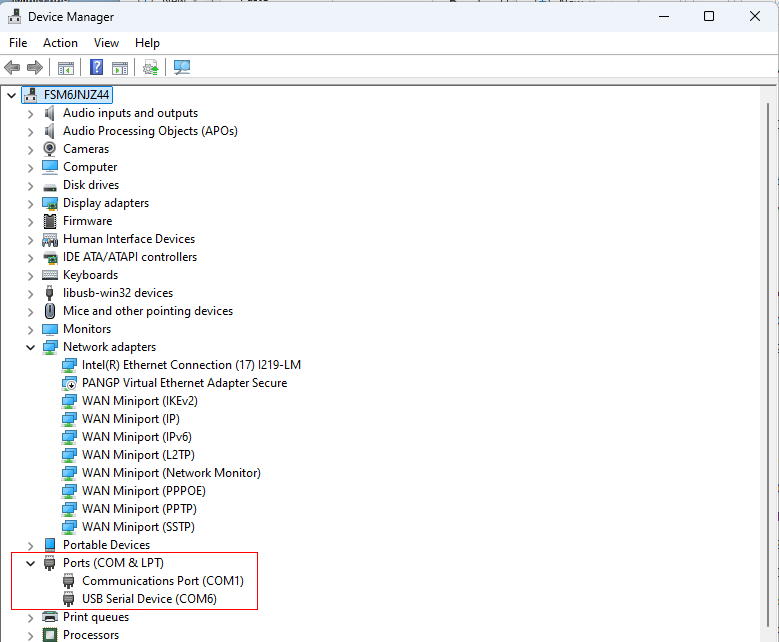
�Ԃň͂��������|�[�g�ԍ��ł��B���̒���USB serial Device (COM6)��Arduino�ł��B�����ǂꂩ������Ȃ��ꍇ��Arduino����USB�P�[�u�����Ăǂ̔ԍ��������邩�Ŋm���߂Ă��������B
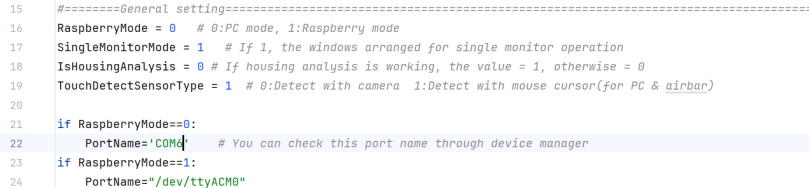
���ɃI�y�����g�n�E�X�Őݒ肳�ꂽ�|�[�g�ԍ����m�F���܂��B
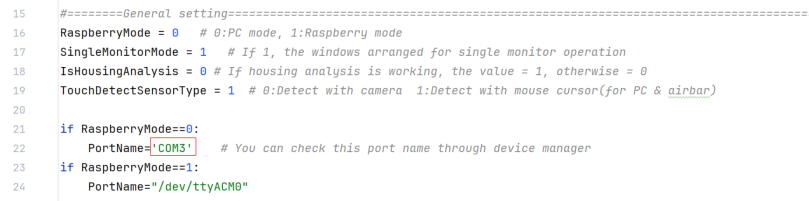
�|�[�g�ԍ���COM3�ƂȂ��Ă���̂ł����COM6�ɕς��܂��B
�����J��������������m�[�gPC���g���Ă���ꍇ�́A�f�o�C�X�}�l�[�W���[��deactivate���Ă����Ă��������B
[Miniscope]
����̎����ł�Miniscope���̃\�t�g�ōs���J�������L���v�`���[����K�v���Ȃ����߁AMiniscope���̃\�t�g��config file��ς��ABehavior camera�L���v�`���[���I�t�ɂ���K�v������܂��B
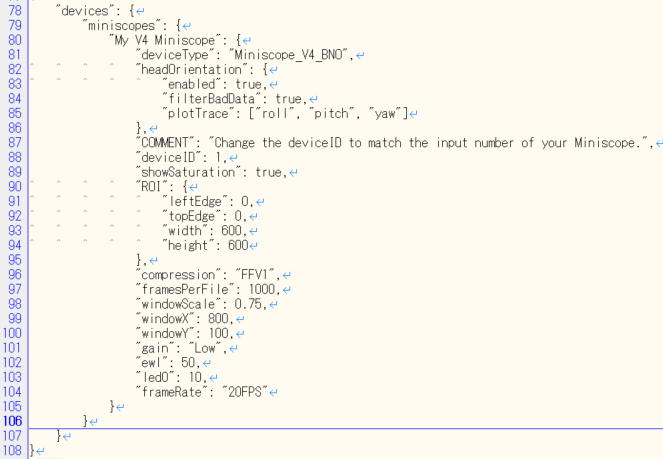
Miniscope�̃f�t�H���g��Configfile�ł���UserConfigExample-V4-Miniscope-plus-WebCam.json���������ŊJ���A�Ԃň͂���"cameras"�̍��ڂ��폜���Ă��������B
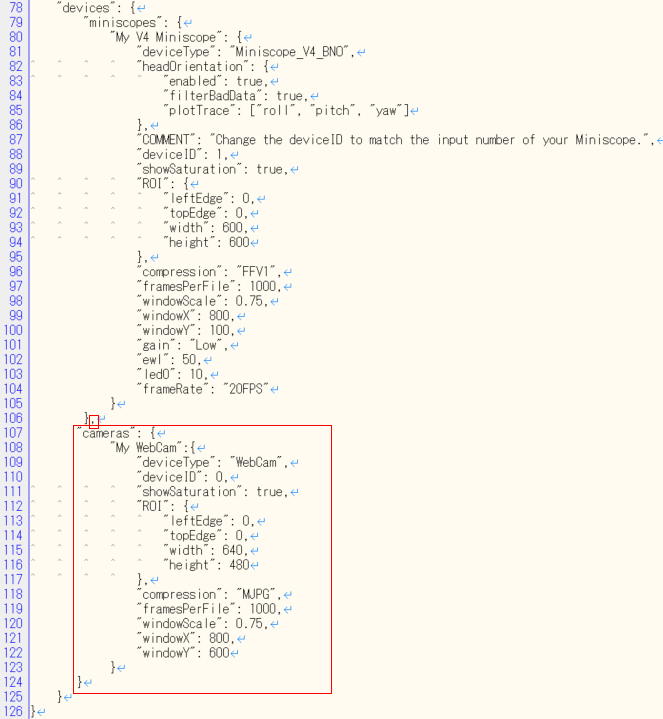
�폜��A���̂悤�ɂȂ��Ă����OK�ł��B
����őS�Ă̏������ł��܂����B
�\�t�g�̋N����Anaconda����s���܂��B
Anaconda��OperaEnv��activate���Acd�R�}���h���g���ăJ�����g�f�B���N�g�����I�y�����g�n�E�X�̃t�H���_�Ɉڂ��܂�(�p�X�͊����ɈقȂ�܂�)�B

����python�R�}���h���g���ăI�y�����g�n�E�X�̃R�[�h�����s���܂��i�Ō�̃v���O�����̃t�@�C�����̓o�[�W�����A�b�v�ŕς��̂ŁA���Ȃ��̃t�H���_���ɂ���t�@�C�����ɂ��Ă��������j�B

�I�y�����g�n�E�X���N�������玟��Miniscope�̃\�t�g���N�����AMiniscope�̉摜������ɃL���v�`���[����邩�`�F�b�N���܂��B
<�����\������Ȃ��ꍇ>
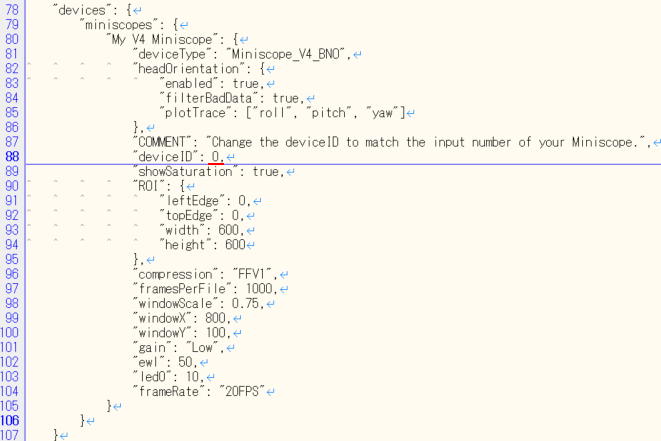
�J����ID�̐ݒ肪�Ԉ���Ă���\��������̂Łi����I�y�����g�n�E�X�̃J������0, Miniscope��1�̃J����ID������U���Ă���O��̐ݒ�j�A�J����ID���ȉ��̎菇�œ���ւ��Ă��������B
�I�y�����g�n�E�X�̃\�[�X�R�[�h��CameraID��1�ɕύX�@�@�@�@�@�@
Miniscope��config�t�@�C����deviceID��0�ɂ���
�J����ID�̊���U��͓����ڑ��p�^�[���ł���Ί�{�I�ɓ����ł����A�ς��\�����[���ł͂Ȃ��̂ŕs����o����J����ID�̓���ւ��������Ă݂Ă��������B
�I�y�����g�n�E�X�̓V��J������Miniscope�̗����ŃL���v�`���[�ł��A�I�y�����g�n�E�X�\�t�g��30fps�œ����AMiniscope��frame drop�������グ��ɑ������Ă��Ȃ���ΐ����ł��i�I�y�����g�n�E�X�̕ۑ��p�X��Y�ꂸ�ݒ肵�Ă��������j�B
�y�ԊO���Z���T�[�o�[�̃��t�@�����X�i�ԊO���Z���T�[�o�[���g�p���Ă���ꍇ�̂݁j�z
�J�����Ńp�l���^�b�`�����o���Ă���ꍇ�͂������X�L�b�v���Ă��������B�܂������ł̓��Y�p�C�ł��łɐԊO���Z���T�[�o�[���g�p�����o��������O��ʼn�����s���܂��B�������o���̏ꍇ�͍����j���[�̃I�v�V�����p�[�c�ɂ��ā��ԊO���Z���T�[�o�[���o��O�����ēǂ�ł����Ă��������B
�^�b�`���j�^�[�AArduino�A�V��J�����A�ԊO���Z���T�[�o�[��PC�ɐڑ����Ă��������B
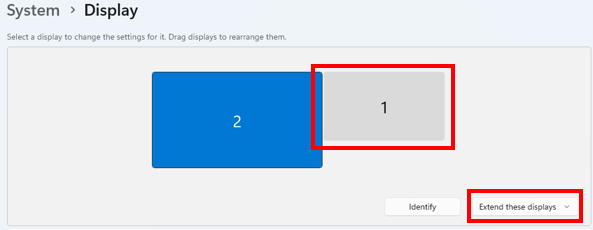
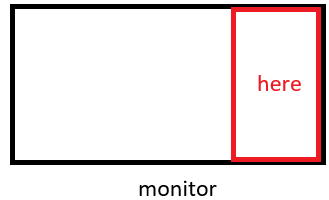
�f�X�N�g�b�v���E�N���b�N���ĉ�ʐݒ���J���A�^�b�`���j�^�[�����C�����j�^�̉E���Ɋg����ʂƂ��Ēu���Ă��������B
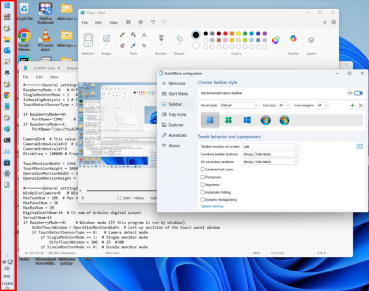
PC�ŐԊO���Z���T�[�o�[���g���ꍇ����{�I�ɂ̓��Y�p�C�ł̂����ƕς��܂���B�������Ȃ���Windows11�ŐԊO���Z���T�[�o�[���g���ƂȂ������C����ʁi�I�y���[�V������ʁj�̉E���̃G���A�Ń}�E�X�|�C���^�������Ă��܂��܂��B���̃G���A������Z���T�[�o�[�G���A�ƌĂт܂��B
���̂܂܂��ƃ}�E�X���p�l�����^�b�`���邱�Ƃ�Windows�̃^�X�N�o�[�𑀍삵�Ă��܂��댯�������邽�߁A�܂��^�X�N�o�[�����ɓ������܂��B
Windows11�̓f�t�H���g�ł̓^�X�N�o�[�����Ȃ��̂�StartAllBack�Ƃ����\�t�g�ŃC���^�[�t�F�C�X��Windows10���ɖ߂��܂��B
���̃\�t�g��Microsoft Store�ɒu���Ă���܂��B
�C���X�g�[������ƒ����Ƀf�X�N�g�b�v��Windows10���ɂȂ�Ǝv���܂��B

�i�X�^�[�g�{�^�������ɗ���j
�^�X�N�o�[���E�N���b�N����Properties��I�т܂��B
Taskbar location on screen�����ɂ��܂��B
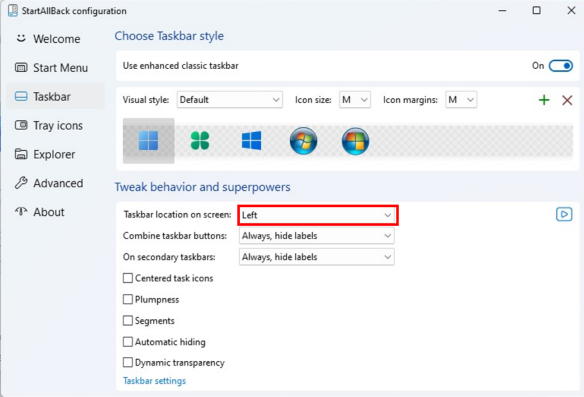
����Ń^�X�N�o�[�����Ɉړ����܂����B�Ȃ�����StartAlllBack�͍ŏ���100���͖����Ŏg���܂����A���̌�L���ɂȂ�܂��E�E�E�B�i7�h�����x�̔�����ł����j
�܂��^�X�N�o�[���^�b�`���j�^�[�ɕ\������Ă���ꍇ�̓^�X�N�o�[���E�N���b�N���Đݒ���o���A�^�X�N�o�[���ڂ��^�X�N�o�[��S�Ẵf�B�X�v���C�ɕ\���������I�t�ɂ��Ă��������B
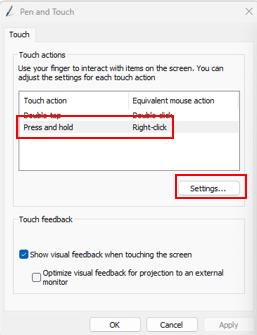
�ԊO���Z���T�[�o�[��Windows�ł̓y��/�^�b�`�f�o�C�X�Ƃ��ĔF������Ă��܂��B�y��/�^�b�`�f�o�C�X�ł͒���������ƃ}�E�X�̉E�N���b�N�ƌ��Ȃ���邽�߂��̋@�\���I�t�ɂ��܂��B
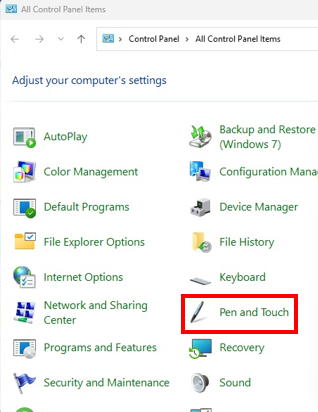
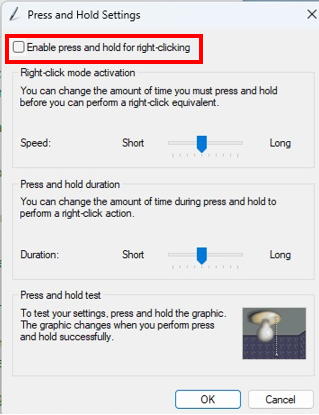
�R���g���[���p�l����Pen and Touch��Press and hold��I�сA�ݒ�{�^���������AEnable press and hold for right-clicking�̃`�F�b�N���O���Ă��������B
(Pen and Touch�͐ԊO���Z���T�[�o�[��ڑ����Ȃ��ƌ���܂���)
���ɐԊO���Z���T�[�o�[�Ń}�E�X�J�[�\�����͈͂��^�b�`�E�B���h�E�ŃJ�o�[���܂��B�������Ȃ��ƃ}�E�X���^�b�`�E�B���h�E�ȊO�̏ꏊ���N���b�N���āA�^�b�`�E�B���h�E����A�N�e�B�u�ɂȂ��Ă��܂��A�I�y�����g�n�E�X���}�E�X�J�[�\���̈ʒu�̃g���b�L���O�𒆒f���Ă��܂����߂ł��B
�I�y�����g�n�E�X�̃R�[�h��General setting�����Ă��������B
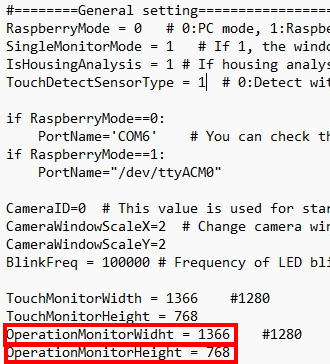
PC�̃��j�^�[���OperationMonitorWidth�̒l������������ƃ^�b�`�E�B���h�E�������ʂɂ͂ݏo���Ă��܂��B�܂����̉���OperationMonitorHeight�̐��l�𑝂₷���ƂŃ^�b�`�E�B���h�E�����ɐL�т܂��B�����̐��l��������A�^�b�`�E�B���h�E���Z���T�[�o�[�G���A���J�o�[����悤�ɂ��Ă��������B
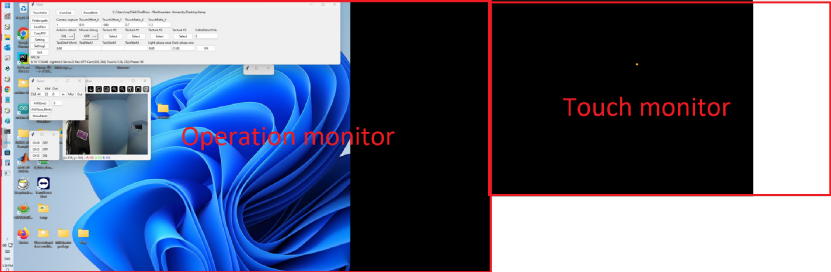
��������ƃ^�b�`�E�B���h�E�����ɓ����č��x�̓^�b�`���j�^�[�̉E�����Ă��܂��Ǝv���܂��B�������Ȃ��悤��TouchMonitorWidth�̒l��傫�����܂��B
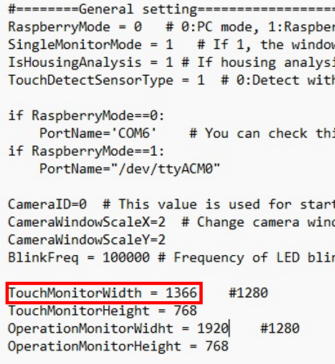
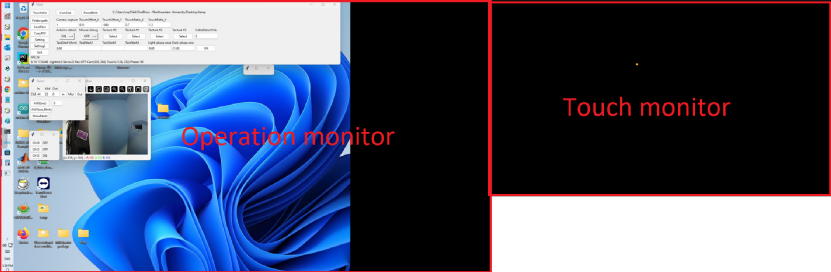
���̍�Ƃ��I������牺�̂悤�ɂȂ��Ă���͂��ł��B
���Ƀ^�b�`�|�C���g�̃��t�@�����X���s���܂��B���ƃ^�b�`�p�l�����^�b�`���Ă��w�̉��ɃI�����W�̃h�b�g������Ȃ��Ǝv���܂��B
����̓��Y�p�C��Windows�ł͐ԊO���Z���T�[�o�[�̍��W���قȂ邩��ł��B
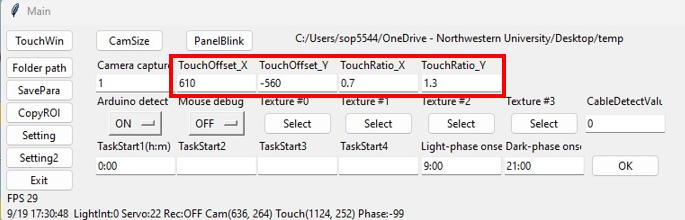
�I�y�����g�n�E�X���N������Setting�{�^���������Ă��������B�l�p�Ŏ������p�����[�^�����܂��B
�����̎d���̓��Y�p�C�g�p���ɍs���������j���[�́u�I�v�V�����p�[�c���ԊO���Z���T�[�o�[���o�v�̂����Ɠ����ł��B
�܂���TouchOffset�ŃI�����W�h�b�g�̈ʒu���V�t�g�����܂��BX�͐��l��傫������ƉE�ցAY�͐��l������������Ɖ��փV�t�g���܂��B
�h�b�g���^�b�`�E�B���h�E�̒��Ɍ����悤�ɂȂ����玟��TouchRatio�����܂��B�^�b�`�����w�̓������h�b�g�̓����������ꍇ��TouchRatio�̒l�������Ă��������B
�w�����Ă��h�b�g���s�^���Ǝw�̉���Ǐ]����悤�ɂȂ�Β��������ł��B
�Ō�Ɏg���ۑ�̃p�l���̈ʒu�����܂��B����̓��Y�p�C�ł̂����Ɠ���Ȃ̂ł����ł͉�����Ȃ��܂��B
�p�l���̈ʒu���킹���I�������ԊO���Z���T�[�o�[�̃��t�@�����X�͊����ł��B
�y�e�X�g�z
Miniscope�ŃL���v�`���[���J�n���A�I�y�����g�n�E�X�̉ۑ���u�X�^�[�g�v�{�^���Ŏ蓮�X�^�[�g���Ă��������B���\�t�g���Ƀ^�C���X�^���v��Windows�̎��v���g���Ă���̂�TTL�M���Ȃǂœ���������K�v�͂���܂���B