operanthouseのヘッダー
Kitaya lab
Lever Module
Follow this instruction if you'll use lever modules.
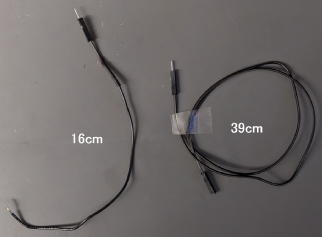
Make relay cables to connect switch board to servos which insert and pull-out levers.
<For left servo>

<For right servo>

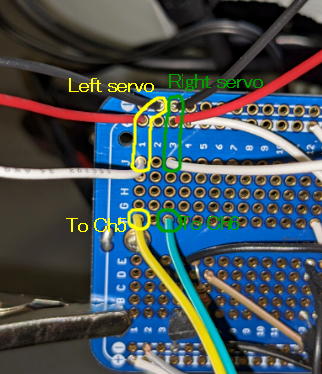
Solder the relay cables to the switch board as shown below.

Let's make lever module.
Glue the part to the lever module.

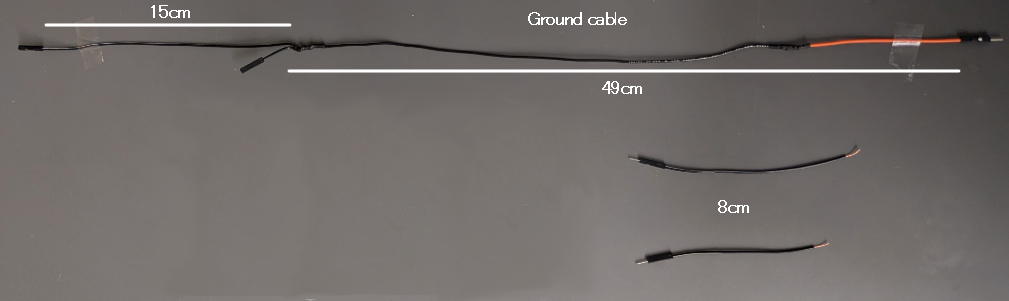
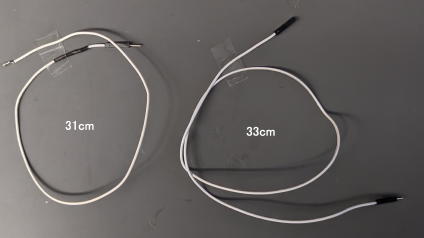
Make wires.
<Ground cabes>
<Input cables for left lever>
<Input cables for right lever>
I printed lever with white filament to make it easier to see from mouse, but any color can be used.
Let's start to make left lever module first.
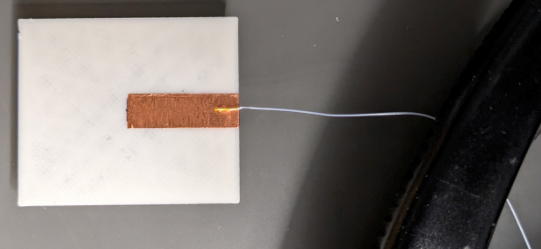
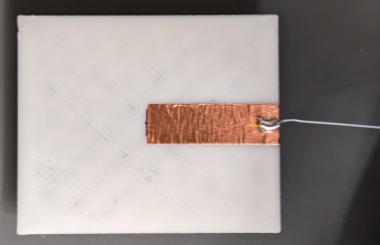
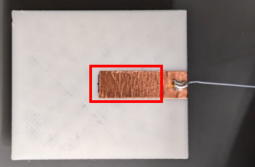
Mark the position 20 mm from the front and apply copper tape as shown in the figure.

 >>>
>>> 
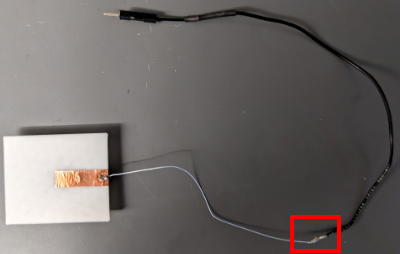
Prepare a thin and soft 10 cm-length wire (in the photo I used a 0.3 mm coaxial cable that I had, but single line cable is enough).
Softer cable is better because it put less tension on the lever.

Solder the cable on the copper cable. Do it quickly not to melt lever.
Solder the soft cable with 16cm input cable.
If you find it difficult, insert the thin wire into the thick wire like this to fix them temporary.


Wipe the surface of the copper tape with alcohol to remove sebum and dirt.
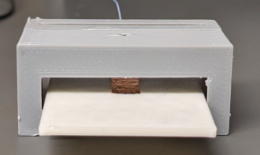
Place the lever in the lever case.

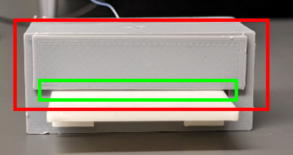
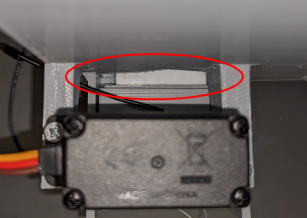
Attach the lever case cover to the lever case with double-sided tape. Place the cover in a position that is close but not touching to the lever (see the place enclosed by green square).
Connect the 8cm wire to the M2x15mm screw.

Secure the wire with a nut.

Solder the wire and nut.

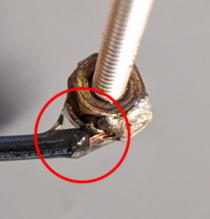
File the tips of the screws to make the tip round and remove dirt and sebum.

To reinforce the joint of the wire, apply instant adhensive like this.
Insert the screw on the lever case (Soldering the screw in the case will melt the case).

Turn the screw to close its tip to the copper tape.
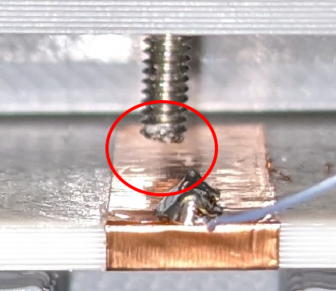
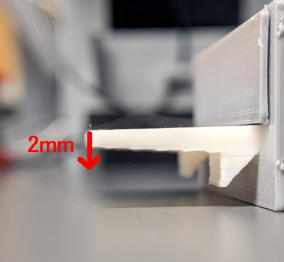
Adjust the depth of the screw so that the tip of the lever can be lowered by 2 mm.
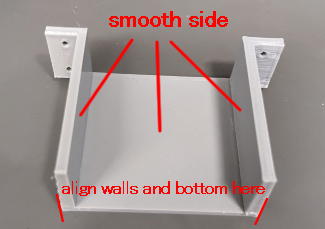
Assemble lever module guide. Lever module slides in this guide so make the inside as smooth as possible.
Face the smooth side (faced the bed during printing) inward and glue them with instant glue. Keep mind to align bottom sides and walls perfectly.
If the glue sticks out on the inside, wipe it off.
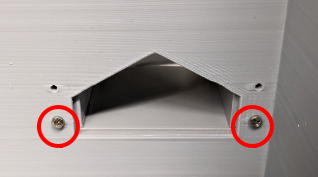
Fix the guide from the inside of the chamber using the lower hole with M2 screws.

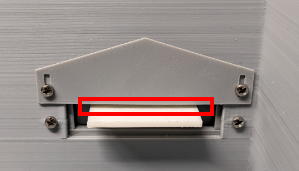
Temporarily fix the lever hole cover.

Next, place the lever module on the guide. Stick the lever out inside the chamber. Adjust the position of the lever hole cover to make the gap between the cover and lever is about 1 mm and secure the screws.

Remove one side of the servo arm with nippers and insert an M2x15mm screw (If you don't have this screw, make it by cutting M2x20).

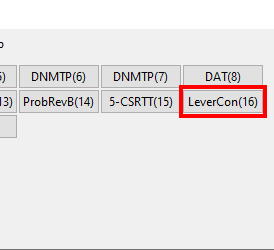
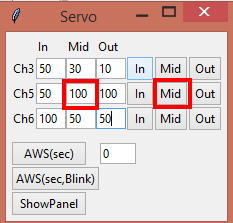
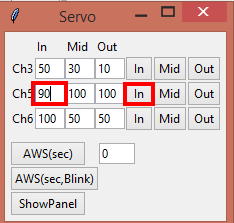
Open "LeverConditioningTask". Set the value of middle angle of Ch5 to 100 and press the "Mid" button. The servo will move.
The servo is angled when the lever module is retracted. Fit the servo arm at the angle in the picture and secure it with the provided screws.

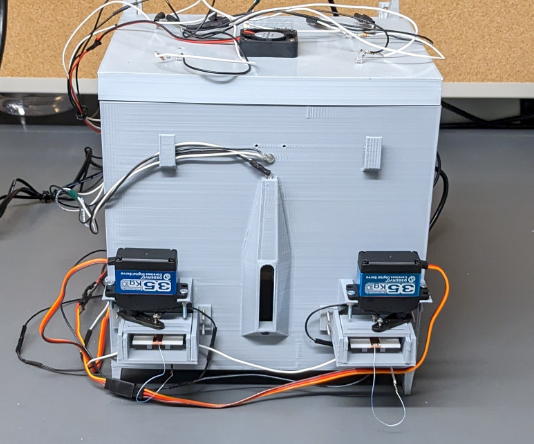
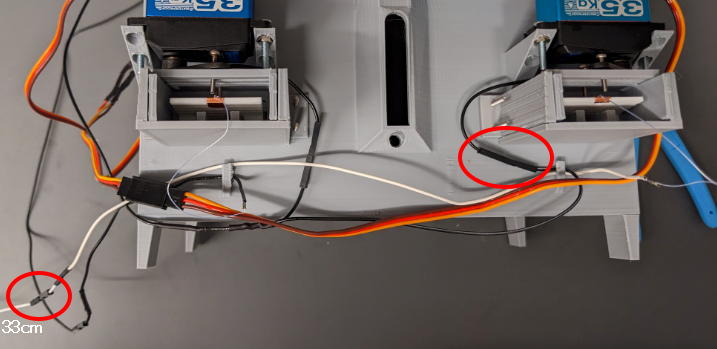
Install the servo with M3x20 screws. Make sure that the wire attached to the screw is sticking out to the right and servo arm screw is inserted into the slit of the lever module.
And the servo arm screw must not interfere with the lever and servo body when the servo moves.
(If the servo body is too low, put M3 nuts into the M3 screws as spacers to raise the servo)


Hook the lever wire to the holder.

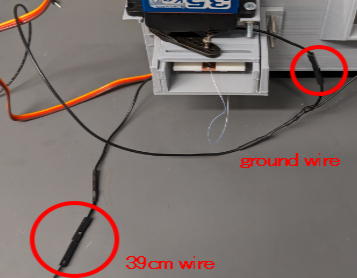
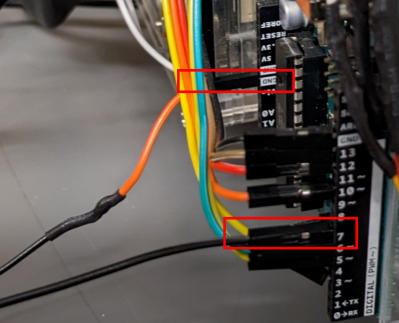
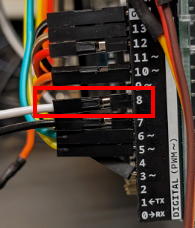
Connect ground wire to the GND of Arduino. Connect lever wire to digital I/O Ch7 of Arduino.
Adjust the servo position.
Connect the servo cable. Find the servo angle that lever module barely fit the chamber by pressing "In" button while reducing the value of Ch5/inside from "100" little by little.
(If the step is too large, the lever module can hit the chamber and cause damages)
Still gap there.
Good position.

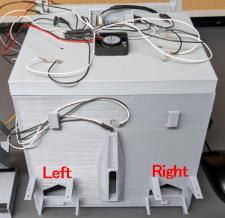
Do the for the right side.
Place the arm with this angle at the "middle angle".

Secure the cover and guide. Install the servo and wire it (stick the screw attached wire out to the left this time). And adjust the "In" angle as with the left side.
Finally, run "LeverConditioningTask" and check whether the lever pressing is detected by the program.